publications
2024
-
 Zhitong Cui, Shuhong Wang, Violet Yinuo Han, Tucker Rae-Grant, Willa Yunqi Yang, Alan Zhu, Scott E. Hudson, and Alexandra IonACM CHI’24, Honolulu, HI, May 2024
Zhitong Cui, Shuhong Wang, Violet Yinuo Han, Tucker Rae-Grant, Willa Yunqi Yang, Alan Zhu, Scott E. Hudson, and Alexandra IonACM CHI’24, Honolulu, HI, May 2024

2023
-
 Best Paper AwardViolet Yinuo Han, Hyunsung Cho, Kiyosu Maeda, Alexandra Ion, and David LindlbauerACM ISS’23, Pittsburgh, PA, Nov 2023
Best Paper AwardViolet Yinuo Han, Hyunsung Cho, Kiyosu Maeda, Alexandra Ion, and David LindlbauerACM ISS’23, Pittsburgh, PA, Nov 2023
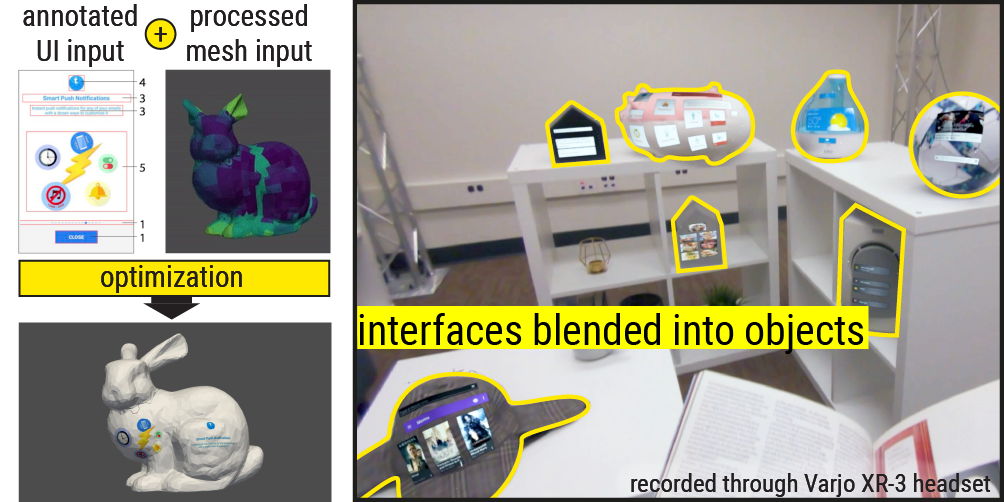
Mixed Reality (MR) systems display content freely in space, and present nearly arbitrary amounts of information, enabling ubiquitous access to digital information. This approach, however, introduces clutter and distraction if too much virtual content is shown. We present BlendMR, an optimization-based MR system that blends virtual content onto the physical objects in users’ environments for ambient information display. Our approach takes existing 2D applications and meshes of physical objects as input. It analyses the geometry of the physical objects and identifies regions that are suitable hosts for virtual elements. Using a novel integer programming formulation, our approach then optimally maps selected contents of the 2D applications onto the object, optimizing for factors such as importance and hierarchy of information, viewing angle, and geometric distortion. We evaluate BlendMR by comparing it to a 2D window baseline. Study results show that BlendMR decreases clutter and distraction, and is preferred by users. We demonstrate the applicability of BlendMR in a series of results and usage scenarios.
-
 Violet Yinuo Han, Abena Boadi-Agyemang, Yuyu Lin, David Lindlbauer, and Alexandra IonACM UIST’23, San Francisco, CA, Nov 2023
Violet Yinuo Han, Abena Boadi-Agyemang, Yuyu Lin, David Lindlbauer, and Alexandra IonACM UIST’23, San Francisco, CA, Nov 2023
Haptic feedback is important for immersive, assistive, or multimodal interfaces, but engineering devices that generalize across applications is notoriously difficult. To address the issue of versatility, we propose Parametric Haptics, geometry-based tactile feedback devices that are customizable to render a variety of tactile sensations. To achieve this, we integrate the actuation mechanism with the tactor geometry into passive 3D printable patches, which are then connected to a generic wearable actuation interface consisting of micro gear motors. The key benefit of our approach is that the 3D-printed patches are modular, can consist of varying numbers and shapes of tactors, and that the tactors can be grouped and moved by our actuation geometry over large areas of the skin. The patches are soft, thin, conformable, and easy to customize to different use cases, thus potentially enabling a large design space of diverse tactile sensations. In our user study, we investigate the mapping between geometry parameters of our haptic patches and users’ tactile perceptions. Results indicate a good agreement between our parameters and the reported sensations, showing initial evidence that our haptic patches can produce a wide range of sensations for diverse use scenarios. We demonstrate the utility of our approach with wearable prototypes in immersive Virtual Reality (VR) scenarios, embedded into wearable objects such as glasses, and as wearable navigation and notification interfaces. We support designing such patches with a design tool in Rhino.
-
 Hugo Souza Oliveira, Niloofar Saeedzadeh Khaanghah, Violet Yinuo Han, Alejandro Carrasco-Pena, Alexandra Ion, Michael Haller, Giuseppe Cantarella, and Niko MünzenriederIEEE Sensors Letters, Nov 2023
Hugo Souza Oliveira, Niloofar Saeedzadeh Khaanghah, Violet Yinuo Han, Alejandro Carrasco-Pena, Alexandra Ion, Michael Haller, Giuseppe Cantarella, and Niko MünzenriederIEEE Sensors Letters, Nov 2023
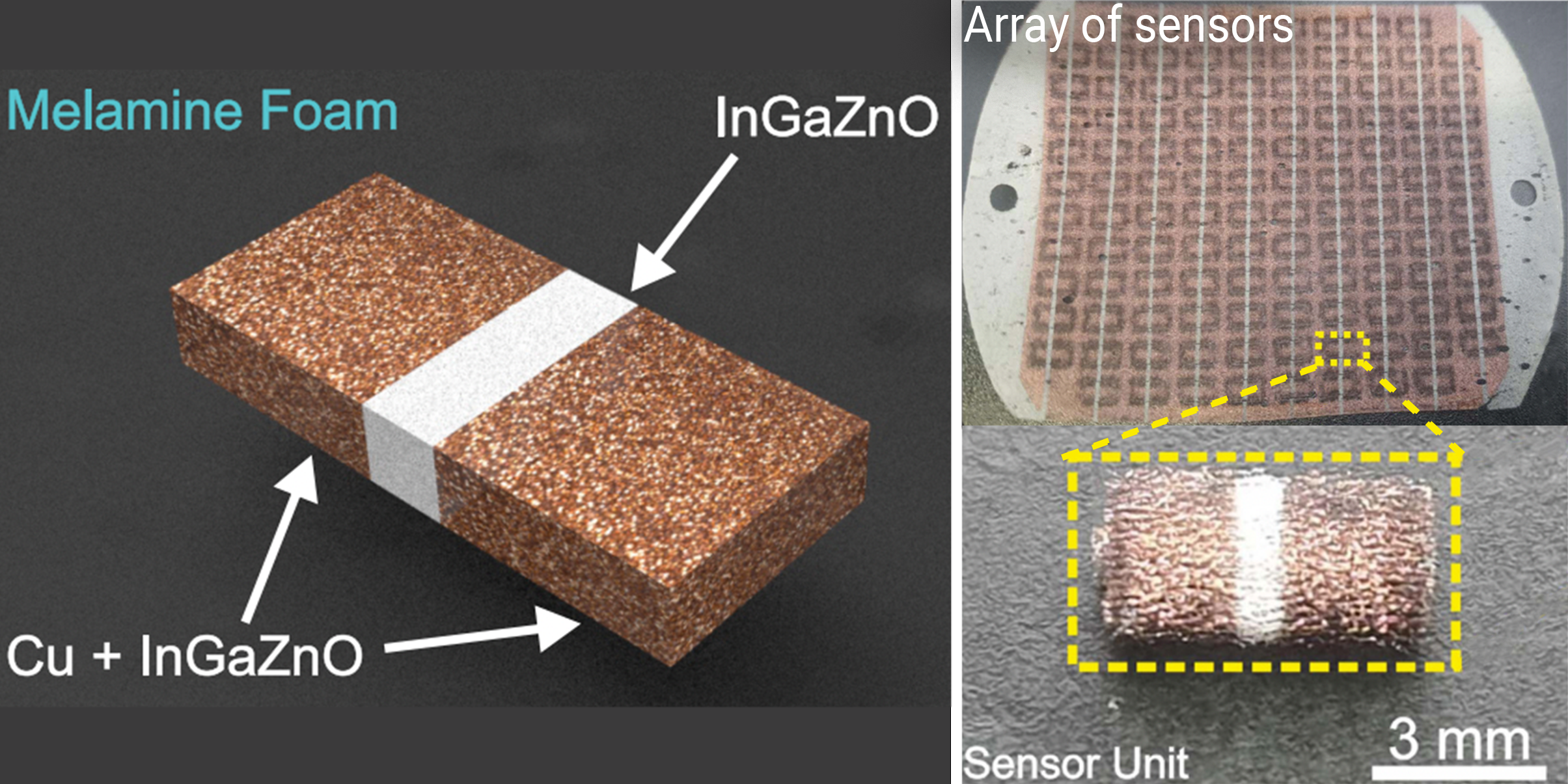
Flexible sensors and electronics have gained much attention in recent years. They are especially interesting due to their abilities to conform to static and dynamic surfaces while keeping their functionality. These characteristics make them relevant for a wide range of applications, from health care and fitness monitoring to soft robotics. In this work, we go beyond simple mechanical flexibility and present a lightweight and permeable flexible sensor utilizing melamine foam as a substrate. The foam is coated with metallic copper (Cu) and semiconductive Indium-Gallium-Zinc-Oxide (InGaZnO) to form a thermistor-type temperature sensor. The sensor showed a very stable response when cycling the temperature between 25 °C and 51 °C, exhibiting a maximum sensitivity of −01.6%∘C−1 , a permeability of 366.6gm−2h−1 at 24 °C, and a maximum resistance variation of −2.9%RH−1 when varying the relative humidity from 40% to 70%. The device also remained fully functional even after being bent to a radius of 5 mm.


